Math 234 — Study guide 1st midterm
Syllabus |
Homework assignments |
About the exams |
Using your computer |
Lecture schedule
Topics covered
Vectors.
- Equation of lines and planes.
- Dot and cross product: basic properties (are they
commutative? distributive? associative?)
- Algebra with dot and cross product: Problems 13&15,
chapter 1.
- Angle between vectors; angle between planes (e.g. problem 10
from chapter 1).
Vector functions/Parametric curves.
- Parametric representation of a line, given one point and a
vector in the direction of the line.
- Motion on a circle with constant angular velocity.
- Know how to compute the velocity, acceleration, unit tangent for
a parametric curve.
- Know the definition of the curvature vector, and be able
to explain why the curvature vector is perpendicular to the
unit tangent of a curve.
- Find the length of a parametric curve.
- Know and use the product rules for dot products and cross
products of vector functions.
E.g. Problem 3 in Chapter 2,
and also these extra problems
Quadratic functions.
- Know how to determine if they are positive definite,
negative definite, indefinite, or semi definite.
- Find the zeroset, and the regions where a quadratic function
is positive (or negative).
(as in problems 5 and 6 for chapter 3.)
About plane curves and tangents
-
(a) Find a parametric equation for the line $\ell$
through the points $A (3,0,1)$ and $B (2,1,2)$.
(b)
Where does $\ell$ intersect the coordinate planes?
answer
-
(a) Find a parametric equation for the line which contains
the two points $A =(2,3,1)$ and $B =(3, 2, 3 )$.
(b) The point $C = (c_1, 1, c_3)$ is on this line. What
is $C$?
answer
-
Let $A$ be the point $(1,0)$ in the plane, and let $X(t)$ be the point $(t, t^2)$.
(a) Which curve is traced out by the point $X(t)$ as you vary the parameter $t$?
(b) Find a parametric representation for the line $\ell$
through $A$ and $X(t)$. (since the point $X(t)$ depends on
$t$, you will get a different line for each choice of $t$.)
(c) Let $t$ be any number. Where does the line $\ell$ intersect the $y$-axis?
answer
-
Consider the plane curve given by $\vx(t) = \begin{pmatrix} t^2 \\ t^3
\end{pmatrix}$
(a) Find a parametric representation of the tangent line to
the curve at the point with position vector $\vx(1)$.
(b) Find a parametric representation of the tangent line to
the curve at the point with position vector $\vx(a)$ for any value of the constant
$a$.
(b) The velocity vector is still $\vx'(t) = \vek 2t \\ 3t^2
\tor$, so the velocity vector at $t=a$ is $\vx'(a) = \vek 2a\\3a^2
\tor$. This vector is a tangent vector to the curve at the
point $\vx(a) = \vek a^2 \\a^3 \tor$. So the tangent at this
point is the line through $\vx(a)$ with direction $\vx'(a)$:
\[
\vy(t) = \vek a^2\\a^3\tor + t \vek 2a\\3a^2\tor
\]
answer
About cross and dot products, and the product rule
- A vector function $\vx(t)$ describes the motion of a point in
space. It is known that there is a constant vector $\vm$ such that
the velocity $\vv(t)$ always satisfies $\vv(t) = \vm \times \vx(t)$.
Show that the quantity $\vm\cdot \vx(t)$ is constant.
answer
-
A vector function $\vx(t)$ describes the motion of a point in
space. It is known that there is a constant vector $\vm$ such
that the velocity $\vv(t)$ and acceleration $\va(t)$ always
satisfy $\va(t) = \vm \times \vv(t)$.
Show that the quantity $\|\vv(t)\|^2$ is constant.
Then show that the angle between $\vm$ and $\vv(t)$ is constant
(hint: look at the dot product $\vm\cdot\vv(t)$).
-
A vector function $\vx(t)$ describes the motion of a point in space.
It is known that there is a constant number $C$ such that the
acceleration $\va(t)$ always satisfies $\va(t) = -C \vx(t)$. Show
that the quantity $\vx(t)\times\vv(t)$ is constant (where $\vv(t)$ is by
definition the velocity vector).
Answers
Answer to Problem 1:
(a)
$\vx(t) = \vek 3\\ 0\\1 \tor + t \vek -1\\ 1\\1 \tor = \vek 3-t\\ t\\ 1+t \tor$.
(b) Intersection with $xy$ plane when $z=0$, i.e.\ when $t=-1$, at $(4, -1,
0)$.
Intersection with $xz$ plane when $y=0$, when $t=0$, at $(3,0,1)$ (i.e.\ at
$A$). Intersection with $yz$ plane when $x=0$, when $t=3$, at $(0, 3, 4)$.
Answer to Problem 2:
(a) $\vec{x}(t)=\vek 2 \\ 3 \\ 1 \tor+t\vek 1 \\ -1 \\ 2 \tor$
(b) $C$ is the point $(4, 1, 5)$
Answer to Problem 3:
(a) the parabola, $y=x^2$
(b) The equation that we know for a parametrization of a
line, $\vx=\va+t\vv$, contains the variables $\vx$ and $t$.
We can't use those variables because they were already used in
the problem. So we change them to, say, $\vy$ and $s$: we get
\[
\vy = \va + s\overrightarrow{AX}
=\vek 1\\ 0 \tor + s \vek t-1 \\ t^2 \tor
=\vek 1+s(t-1) \\ st^2 \tor.
\]
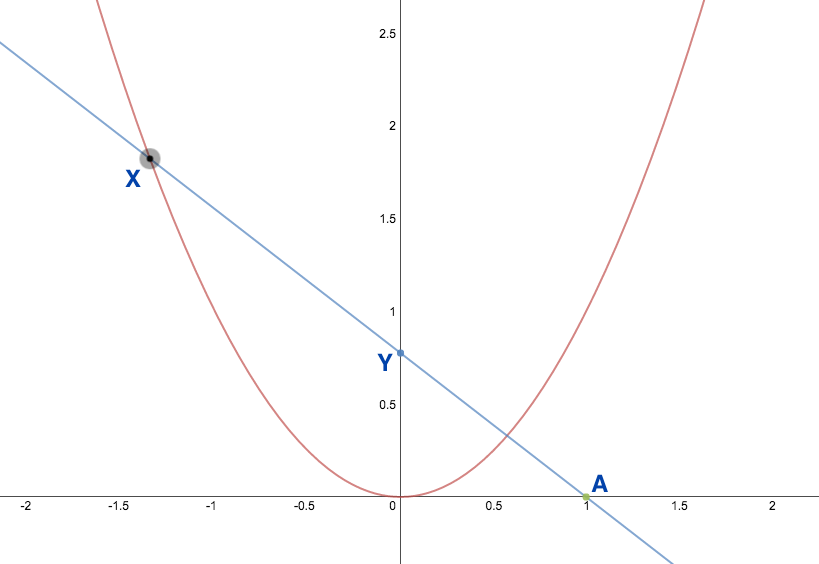
(c) What is given, and what is unknown? Here $t$ is given.
Varying $s$ will slide the point $Y$ with position vector
$\vy$ along the line $\ell$. So we have to find an $s$ for
which $Y$ is on the $y$-axis, and, since $t$ is given, our
answer will depend on $t$. The point $Y$ is on the $y$-axis if its
$x$-coordinate vanishes. So, we solve
\[
1+s(t-1)=0 \implies
s = \frac{1}{1-t}.
\]
Hence the intersection point is $Y$
with the above value of $s$
\[
\vy = \vek 0\\ t^2/(1-t) \tor.
\]
Answer to problem 4:
Chapter 2, section 3, tells you how to find the
parametrization of a line. Read that first before reading the
rest of this answer. To parametrize a line, you need one
point on the line, and a vector in the direction of the line.
(a) The velocity vector is $\vx'(t) = \vek 2t \\ 3t^2
\tor$, so the velocity vector at $t=1$ is $\vx'(1) = \vek 2\\3
\tor$. This vector is a tangent vector to the curve at the
point $\vx(1) = \vek 1 \\1 \tor$. So the tangent at this
point is the line through $\vx(1)$ with direction $\vx'(1)$:
\[
\vy(t) = \vek 1\\1\tor + t \vek 2\\3\tor
\]
The $t$ in this parametrization is not the same as the $t$ in
the parametrization $\vx(t)$ for the curve. To avoid
confusion, one sometimes chooses a different letter, for
instance,
\[
\vy(s) = \vek 1\\1\tor + s \vek 2\\3\tor
\]
or, use a greek letter,
\[
\vy(\alpha) = \vek 1\\1\tor + \alpha \vek 2\\3\tor.
\]
Answer to problem 5. To show that $\vm\cdot\vx(t)$ is constant we
differentiate it with respect to time, keeping in mind that the
derivative $\vx'(t)$ is the same as the velocity $\vv(t)$:
\[
\frac{d \vm\cdot\vx(t)} {dt} = \vm\cdot\vx'(t) =
\vm\cdot\bigl(\vm\times\vx(t)\bigr).
\]
Since the cross product $\vm\times\vx(t)$ is always perpendicular to the vector $\vm$ it follows that
\[
\frac{d \vm\cdot\vx(t)} {dt} = 0
\]
so that $\vm\cdot\vx'(t)$ is indeed constant.